What is Physical Addressing Vs Functional Addressing in CAN protocol? How do these two addressing schemes differ from each other? Physical addressing targets a specific ECU by using a unique address, ensuring that only the intended module processes the message. In contrast, functional addressing sends a request to all ECUs capable of performing a specific function, allowing multiple modules to respond based on their capabilities. Let’s Discuss here.
Table of Contents
What are Addressing schemes in a CAN network?
Addressing refers to the methods used to identify and communicate with different ECUs on a CAN network. There are primarily two addressing schemes in CAN bus protocol, i.e., Physical Addressing vs. functional addressing.
Physical addressing targets a specific ECU using its unique identifier, while functional addressing sends messages to multiple ECUs that serve a common function. Choosing the right scheme depends on the use case, such as diagnostics, broadcasting commands or targeted control actions.
Physical Addressing in CAN Bus
Physical addressing scheme labels CAN bus messages based on their physical address location. In physical addressing, the system assigns each node on the CAN bus a unique identifier called a node address or physical address. When a node (ECU) wants to communicate with another node, it includes the destination node’s physical address in the CAN message header. The receiving node checks the address and determines if the message belongs to it. Physical addressing offers a straightforward and efficient method but requires pre-configuring the addresses for each node.
Example: $7E0 is the Physical Address (CAN ID) of the Engine Control Module (ECM). The response from ECM will be with CAN-ID $7E8. And $7E1 is the Physical address of the Transmission Control Module (TCM). The response from TCM will be $7E9.
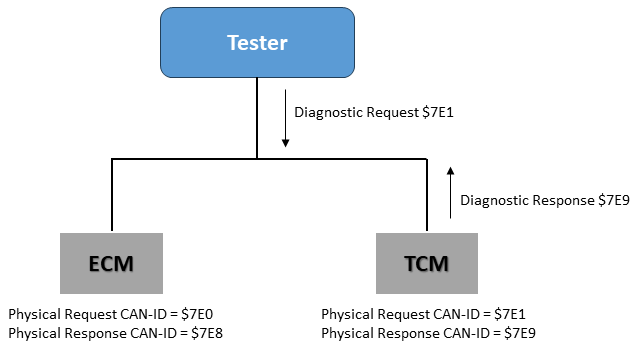
If the Tester sends a Diagnostic request with CAN ID $7E1, then since it is a Physical address, only the concerned ECU will respond, i.e., TCM with CAN ID $7E9. There is no response from ECM.
Functional Addressing in CAN Bus
Functional addressing categorizes messages based on their content or functionality. It enables communication with a group of ECUs that share a common capability, such as support for a comprehensive function like OBD diagnostic protocol. Engineers also refer to functional addressing as message-based addressing or broadcast addressing. Unlike physical addressing, it does not rely on specific node addresses.
When a node wants to send a message, it assigns a particular message ID to it, and all nodes on the bus receive the message. Each node then decides whether the message is relevant to its function based on the message ID. Functional addressing simplifies network management as nodes don’t need pre-assigned addresses, but it may lead to more network traffic since all nodes receive every message.
If you want to learn more about physical and functional addressing in CAN as well as vehicle diagnostics, you can check this book which is available on Amazon: ‘Road vehicles – Diagnostic Communication’ by Christoph Marscholik and Peter Subke‘. Here is the link to buy this book on Amazon.
Disclaimer: This link is an Amazon affiliate link. If you buy this book through the link, Amazon pays me a small commission at no extra cost to you.
This book explains a lot about vehicle diagnostics, in-vehicle networks, UDS protocol and much more.
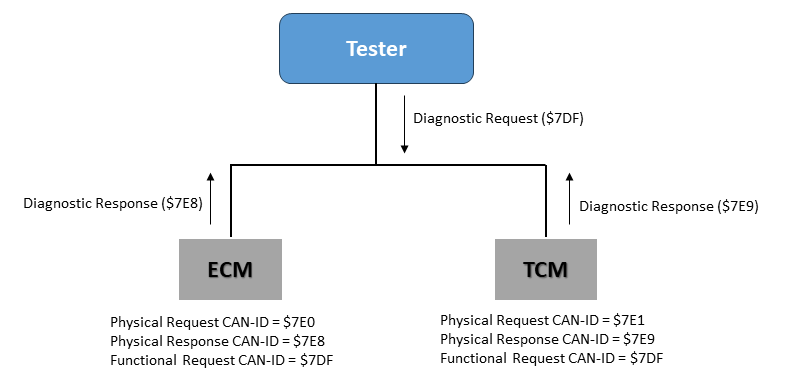
Example: You send the request using a Functional Address ($7DF). Both the ECM and TCM respond with CAN IDs $7E8 and $7E9, respectively.
Note: There is no Functional Response CAN ID.
Physical Addressing vs Functional Addressing in CAN Bus: A quick recap
| Physical Addressing | Functional Addressing |
|---|---|
| Pros: Direct and efficient communication between specific nodes | Cons: Increased network traffic due to broadcasting messages to all nodes. |
| Pros: Clear identification of message recipients, minimizing network traffic. | Cons: Requires robust filtering mechanisms to ensure nodes only process relevant messages. |
| Cons: Requires manual configuration of addresses for each node, which can be cumbersome in large networks. | Pros: Simplifies network configuration as nodes do not require pre-assigned addresses. |
| Cons: Limited scalability as the number of nodes increases. | Pros: Enhances flexibility and scalability, especially in dynamic networks where node addresses may change. |
Final Thoughts
In summary, physical addressing offers direct communication between specific nodes with minimal overhead but requires manual address configuration and may limit scalability.
On the other hand, functional addressing simplifies network configuration and enhances flexibility but increases network traffic and necessitates efficient message filtering mechanisms. The choice between the two addressing schemes depends on network size, complexity and the desired level of flexibility.
In many real-world automotive applications, engineers combine both approaches to balance targeted diagnostics with broader function-based communication. Designers must understand the trade-offs between these schemes to build efficient and reliable in-vehicle communication systems.