
In modern vehicles and embedded systems, the CAN BUS and LIN protocol serve crucial but distinct roles. This article offers a deep technical comparison of CAN vs LIN, covering architecture, data rates...
The CAN Transport Protocol (CAN-TP) physical layer defines the hardware & electrical characteristics of the CAN protocol and specifies how data is transmitted over the physical medium. It includes...

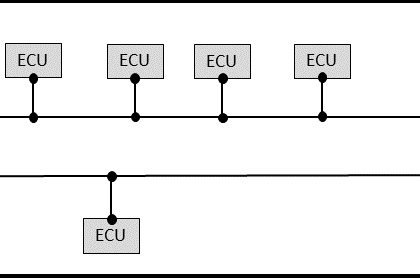
A CAN controller manages communication over the CAN bus. It handles tasks such as message framing, error detection & message arbitration to ensure reliable data exchange between ECUs. CAN Controll...
Each CAN message in a CAN protocol has a unique hexadecimal Identifier called as CAN-ID or CAN Arbitration ID. A CAN-ID uniquely identifies a CAN message. Specifically, there are two types of frames o...
