Each CAN message in a CAN protocol has a unique hexadecimal Identifier called as CAN-ID or CAN Arbitration ID. A CAN-ID uniquely identifies a CAN message. Specifically, there are two types of frames or CAN-IDs: Standard CAN and Extended CAN frames. In other words, each frame type serves a distinct purpose within the CAN protocol. These two frame types are fundamental components of the CAN protocol, each designed with specific purposes & characteristics. Lets discuss these 2 types of CAN frames and their differences.
Table of Contents
Standard CAN frame format (11-bit CAN ID)
CAN 2.0 A Standard CAN frames, also known as 11-bit frames, are the most commonly used form of CAN communication. It is a 11-bit identifier value. It can contain up to 2^11 = 2048 unique CAN-IDs.
Example: 100 0100 0100 (binary 11 bits) i.e. 0x777 (hex).
Standard CAN frames suit most automotive ECUs where the network has a limited number of nodes, and message identifiers do not need extensive addressing space.
Here is the frame format of a Standard CAN frame:
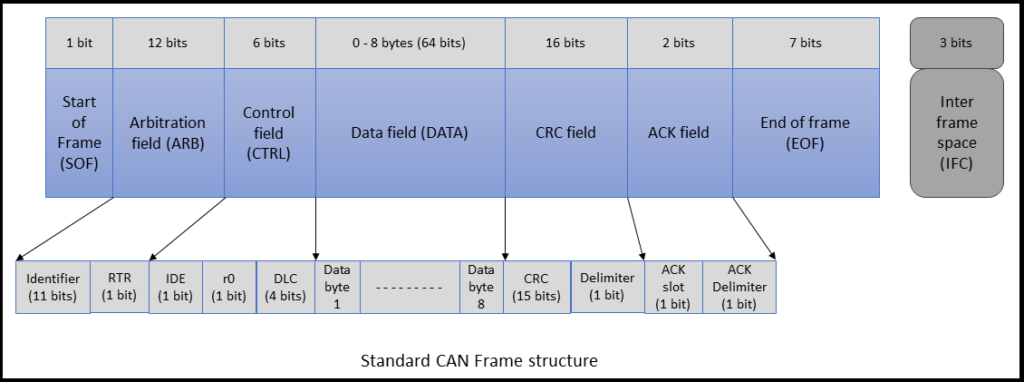
There are 7 fields in a CAN frame. They are listed below:
1. Start of frame (SOF)
It is 1 bit long which is a dominant (0) bit.
2. Arbitration field (ARB)
It is 12 bits long. It consists of:
- A 11 bits long CAN Identifier
- The Remote Transmission Request (RTR) is 1 bit long. Specifically, if RTR is a dominant (0) bit, then it is considered a Data frame. On the other hand, if it is a recessive (1) bit, then it becomes a Remote frame.
3. Control field (CTRL)
It consists of 6 bits.
- The Identifier Extension (IDE) is 1 bit long. In particular, if IDE is dominant, it represents a standard frame with an 11-bit identifier. Conversely, if IDE is recessive, it indicates an extended frame with a 29-bit identifier. Thus, the IDE bit determines the type of CAN frame being transmitted.
- R0: 1 bit long. It is reserved for future use. It must be a dominant (0) bit.
- The Data Length Code (DLC) is 4 bits long. It determines the length of the data to be transmitted. It’s value can range from 0 to 8 bytes in a CAN frame.
4. Data field (DATA)
This field contains the actual data transmitted by the CAN frame. It can be of 0 – 8 bytes in length.
5. Cyclic Redundancy Check field (CRC)
This field is 16 bits long. It contains:
- CRC field: 15 bits
- CRC Delimiter: 1 bit. It is a recessive bit.
6. Acknowledgement field (ACK)
It is 2 bits long.
- ACK Slot: 1 bit long. Sender sends ACK slot as recessive. After successful reception of the message, the receiver overwrites it as a dominant bit.
- ACK Delimiter – It is a recessive bit.
7. End of frame (EOF)
It is of 7 bits length and all are recessive (1111111). It marks the end of a CAN frame.
Interframe Space (IFC) in Standard CAN and Extended CAN frame
It represents the space between two frames, also referred to as the intermission and the bus idle time between Data or Remote Frames. Moreover, it does not constitute part of the CAN frame and comprises three recessive bits (i.e., 111).
If no further action follows, the bus remains in a recessive idle state, during which no node can initiate a message transmission. On the other hand, if a dominant bit is detected during the Inter Frame Space, then an Overload Frame will be sent. As a result, the bus can handle exceptional conditions while maintaining proper communication timing.
Extended CAN frame format (29-bit CAN ID)
Extended CAN 2.0B has a 29-bit identifier, which means that there are 2^29 = 536,870,912 unique CAN-IDs. Furthermore, with a longer 29-bit identifier field, Extended CAN frames support a significantly larger address space. As a result, they can accommodate up to or over 500 million unique message identifiers.
Example: 10101010111000111010101011101 (binary 29 bits) i.e., 0x155C755D (hex).
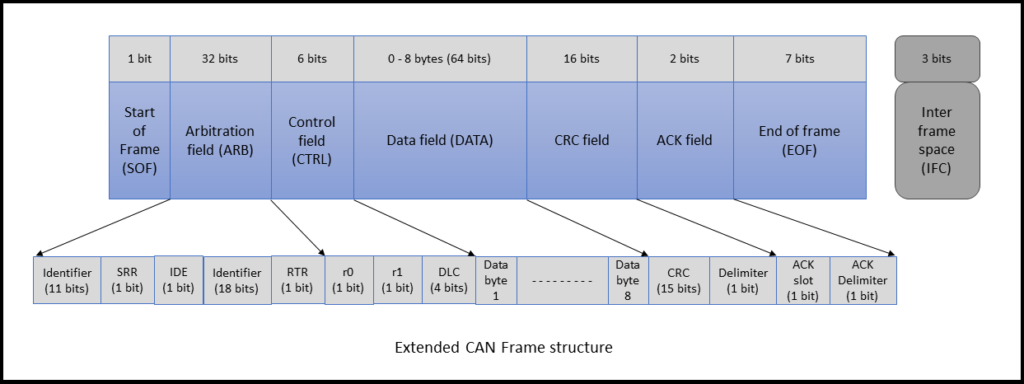
Like the Standard frame, the Extended frame also contains 7 fields. However, only the ARB and CTRL fields differ between the two. In other words, the structure is mostly the same, with just minor variations in these specific fields.
1. Arbitration field (ARB)
It is 32 bits long. It consists of:
- 11 bits long CAN Identifier and it decides the message priority.
- SRR (Substitute Remote Request). It is 1 bit long and is always transmitted as a recessive (1) bit to ensure that in case of arbitration between a Standard and Extended Data Frame, the Standard Frame will always have the priority if both the messages have the same base (11 bit) identifier.
- IDE (Identifier Extension): It is 1 bit long. It is recessive (1) bit and indicates that its an Extended frame. In case of Standard frame, IDE is dominant (0) bit.
- 18 bits long CAN Identifier and it decides the message priority.
- Remote Transmission Request (RTR): It is 1 bit long and tells if its a data or remote frame. It is dominant (0) bit in case of a Data frame and recessive (1) bit for a remote frame.
2. Control field (CTRL)
It consists of 6 bits.
- R0: 1 bit long. It is reserved for future use and must be a dominant (0) bit.
- R1: 1 bit long. It is also reserved for future use and must be a dominant (0) bit.
- DLC (Data Length Code): It is 4 bits long and determines the length of the data to be transmitted i.e. 0 – 8 bytes in a CAN frame.
Standard CAN and Extended CAN frame: A quick recap
Now lets compare 11-bit and 29-bit CAN identifier.
| Standard CAN frame format (11-bit CAN ID) | Extended CAN frame format (29-bit CAN ID) |
|---|---|
| 11 bit CAN-Identifier | 29 bit CAN-Identifier |
| Arbitration field (ARB) is 12 bit long. | ARB field is 32 bit long. |
| If IDE (Identifier Extension) is dominant (0) then its a standard 11-bit frame. Control field (CTRL) contains IDE. | If IDE is recessive (1) then its a Extended 29-bit frame. ARB field contains IDE (Identifier Extension). |
| It does not contain SRR (Substitute Remote Request) bit. | It contains SRR bit and is always transmitted as a recessive (1) bit. |
| CTRL field contains 1 reserve bit (r0). | CTRL field contains 2 reserve bits (r0 and r1). |
| It can contain up to 2^11 = 2048 unique CAN-IDs. | Extended CAN frame can contain up to 2^29 = 536,870,912 unique CAN-IDs. |
If you want to learn more about Automotive Vehicle Testing, Vehicle Diagnostics, and different vehicle communication protocols, then you can also check out this book, which is available on Amazon. Moreover, it provides detailed explanations and practical insights for both beginners and professionals.
‘Road vehicles – Diagnostic Communication’ by Christoph Marscholik and Peter Subke‘.
Here is the link to buy this book on Amazon.
Disclaimer: This is an Amazon affiliate link. Therefore, if you buy this book through the link, Amazon will pay me a small commission at no extra cost to you. In other words, your purchase supports my work without affecting the price you pay.
Final Thoughts: Standard CAN and Extended CAN frame
Standard CAN and Extended CAN frame are integral components of the CAN in-vehicle network, offering distinct advantages and considerations for different applications.
Standard CAN frames, with 11-bit identifiers, offer simplicity and compatibility, ideal for basic networks. Extended CAN frames, featuring 29-bit identifiers, provide vast address space, suitable for complex systems with numerous nodes.
Choosing between them depends on network size, traffic and scalability requirements for optimal CAN bus communication.
Additionally, some ECUs support both formats, therefore allowing flexible implementation depending on the diagnostic or control needs. Consequently, engineers must carefully evaluate message ID conflicts, bandwidth usage, and CAN system architecture when deciding which frame type to deploy.