A CAN controller manages communication over the CAN bus. It handles tasks such as message framing, error detection & message arbitration to ensure reliable data exchange between ECUs.
Table of Contents
CAN Controller
A CAN controller is a hardware component that manages communication on a CAN bus, ensuring reliable data exchange between nodes. It handles the creation and interpretation of CAN frames, manages message priority through arbitration, and detects and corrects errors to maintain data integrity.
The controller integrates acceptance filters to process only relevant messages, reducing the load on the connected microcontroller. Overall, the CAN controller facilitates efficient and robust communication in automotive and industrial applications.
By managing both the physical and protocol layers of communication, the CAN controller enables efficient and error-free CAN communication.
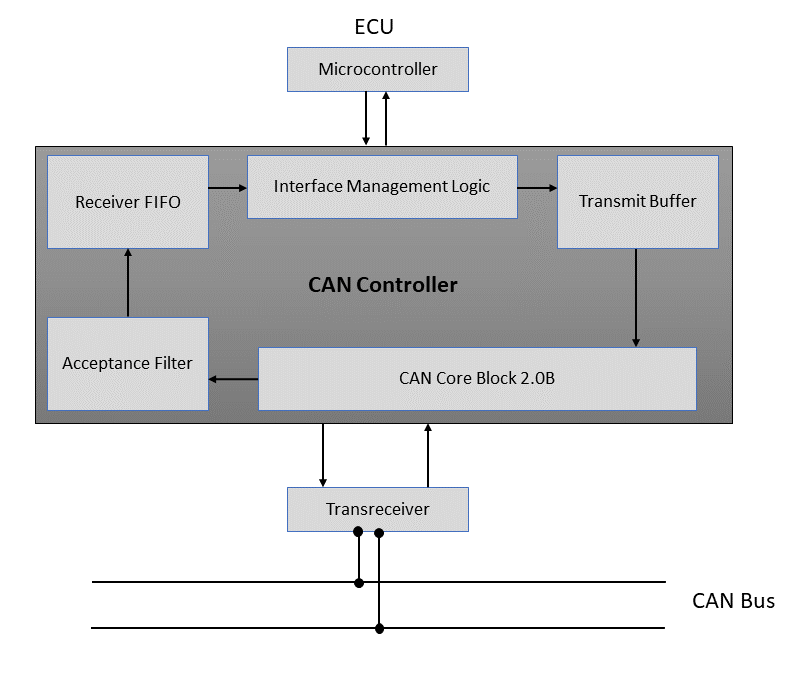
CAN Controller Block Diagram
The CAN controller block diagram typically consists of several key components, each responsible for specific functions within the CAN protocol. Below are the main blocks of CAN controller and their roles:
Acceptance Filter in CAN controller
An acceptance filter decides whether a message is relevant for an ECU. It allows a CAN controller to selectively process only the messages that are relevant to it, thereby reducing the load on the microcontroller and enhancing the overall system performance.
It uses acceptance codes and masks to match incoming message identifiers with predefined criteria. The system ignores messages that don’t meet the filter conditions, preventing it from processing unnecessary data.
This filtering mechanism ensures the node handles only pertinent messages, improving overall system efficiency.
CAN core Block
The CAN core block is a crucial component of the CAN controller hardware, responsible for implementing the CAN bus protocol and managing all communication within the network.
It handles framing, error detection, arbitration and message filtering to ensure reliable data transmission and reception. By strictly adhering to CAN protocol specifications, the core block guarantees accurate and efficient message exchange across the network.
Interface Management Logic
Interface Management Logic in the CAN protocol manages the interaction between the CAN core and the microcontroller. It handles the setup and configuration of the CAN controller, including initialization, mode setting and error handling.
It also manages the data flow to and from the transmit and receive buffers, ensuring smooth communication between the CAN bus and the application software.
Transmit Block in CAN controller
The Transmit Block stores complete CAN messages (standard or extended). It is responsible for handling the preparation and transmission of CAN messages onto the bus. It includes mechanisms for message buffering, priority arbitration, and bit timing to ensure accurate and orderly data transmission.
The Transmit Block sends messages in compliance with CAN protocol standards and manages retries when transmission errors occur.
Receive FIFO
The Receive FIFO is a buffer that stores incoming CAN messages sequentially until they are processed by the microcontroller. It can store up to 32 CAN messages. It helps manage the flow of received data, ensuring that messages are not lost during periods of high bus traffic.
By organizing messages in the order they are received, the Receive FIFO facilitates efficient and orderly data retrieval and processing. Depending on the filter setting, the system either transfers the received messages to the Receive FIFO or not.
Final Thoughts
The CAN controller is a crucial component for managing communication in the CAN networks. This block diagram and its components illustrate the functional architecture of a typical CAN controller, showing how it manages communication on a CAN network efficiently and reliably.
Its primary functions include framing messages, handling error detection and correction, and managing message arbitration to ensure that data is transmitted efficiently and accurately.
By providing mechanisms such as acceptance filters and integrated error management, the CAN controller enhances system reliability and performance. Understanding its operation is essential for designing robust and efficient CAN-based communication systems.